
# 主存储器
# 1. 主存储器的性能指标
- 存储容量、速度、价格
存储容量
- 存储容量是指存储器所能容纳的二进制信息总量,即可存储多少位二进制信息代码。
- 存储容量 = 存储字数(存储单元数) × 字长
例如:PDP-11/23 计算机主存容量为64K字,字长为16位,则可以表示为64K×16位,或128KB
- 常用的计量存储器空间的单位是KB
2^10B、MB2^20B和GB2^30B - 存储器地址码的位数决定了主存可直接寻址的最大空间。
例如:某存储器的地址线12根,数据线16根,则该存储器的容量是
2^12 × 16位,即4K × 16位。
存储器的速度
- 一般用存储器的存取时间、存储周期和存储器带宽来衡量。
- 取数时间:存储器接到读命令信号到期数据输出端有信号输出为止的时间,他取决于存储介质和方为机构的类型。
- 存储周期:存储器进行一次完整的读写操作所需要的全部时间
- 存储器带宽:单位时间内可写入存储器或从存储器取出信息的最大数量。
- 一般用存储器的存取时间、存储周期和存储器带宽来衡量。
存储器的价格
- 存储器的价格常用每位的价格来衡量。
# 2. 主存储器的工作原理
# 3. 随机读写存储器
# 静态MOS存储器
- 存储位元
- 只要不对SRAM断电,存放在里面的数据一直保存。SRAM速度快,一般访问时间十几个纳秒,被广泛应用到Cache中。
- SRAM存储器的组成
- 包括存储体、读写电路、地址译码器和控制电路等部分。
- 存储体:所有存储位元的集合
- 地址译码电路:二进制码转换成输出端电平。
- 地址译码分为两种方式:线性译码和双向译码。线性译码一行一个字,双向译码一个XY坐标确定一个字。
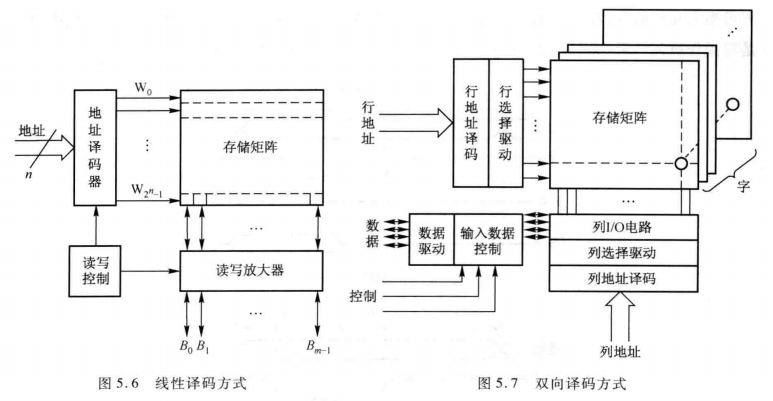
- 相比较而言,线性译码器结构简单,但选择线太多;双向译码方式线少但结构复杂。
- 包括存储体、读写电路、地址译码器和控制电路等部分。
- SRAM的读/写过程
# 动态MOS存储器
- 存储位元
- DRAM存储位元读操作是电容放电,是破坏性的读,读完需要数据再生。
- 由于电容存在漏电阻,为长时间保存信息,需要定时充能,就是所谓的刷新。
- 刷新和再生都是将电容上的信息重写一遍。再生是配合读操作进行的,而刷新是定期对存储矩阵进行扫描,扫描到哪个位元就重新读写那个。
- DRAM集成度高、功耗低、成本低。常用于计算机主存。
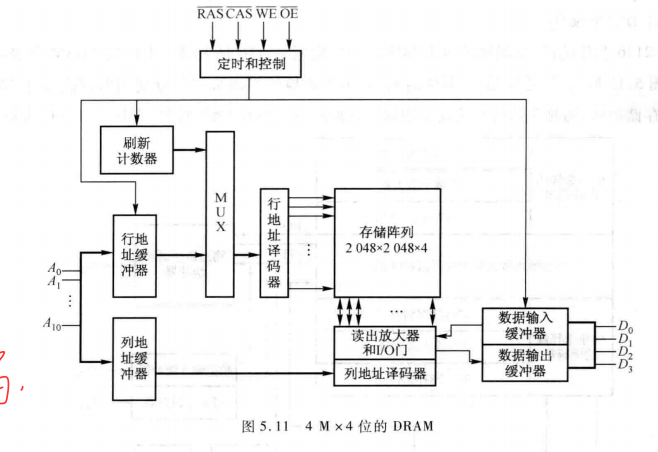
- DRAM存储器的组成
- 采用双向译码,时分复用。
- 采用双向译码,时分复用。
- DRAM读写过程
- DRAM的刷新
- 刷新周期:从上一次刷新结束到下一次对整个DRAM全部刷新一遍为止。
- 通常,DRAM允许的单元刷新间隔时间是2ms。

- 集中式刷新
- 在一个刷新周期中,利用一段固定的时间,依次对DRAM的所有行注意刷新,再刷新期间禁止读/写存储器,这段时间被称为访存“死区”。
eg: 64K × 1 位DRAM中,存储电路由 4 个独立的 128 × 128 的存储矩阵组成,设存储矩阵的存储周期为 500 ns ,单位刷新间隔是 2ms。则每个刷新周期内可以安排 4000 个周期,其中必须有 128 个周期用于刷新,其余 3872 个周期用于正常的访存操作。 访存“死区”时间为 128 × 500ns = 64μ 秒。占整个刷新周期的 3.2 %。
- 集中式刷新的缺点在刷新期间,存储器处于禁止访问状态,“死区”时间过长,不利于系统并行设计。
- 在一个刷新周期中,利用一段固定的时间,依次对DRAM的所有行注意刷新,再刷新期间禁止读/写存储器,这段时间被称为访存“死区”。
- 分散式刷新
- 把每一行的刷新分散到各个存储周期中。每个存储周期被分为两个阶段,前一阶段进行正常访存,后一阶段刷新某一行。存储周期增长一倍。
eg:同样以上述芯片为例,存储周期为 1000 ns (增长为集中式的一倍), 刷新周期为 128μ 秒。则在每个 2ms 内包含 2000 个存储周期,存储矩阵的每行在一个 2ms 内被刷新 10 次以上。
- 分撒刷新没有充分利用允许的最大刷新周期,延长了存储周期缩短了帅鑫周期,从而降低了计算机系统的运算速度。
- 把每一行的刷新分散到各个存储周期中。每个存储周期被分为两个阶段,前一阶段进行正常访存,后一阶段刷新某一行。存储周期增长一倍。
- 异步式刷新
- 异步式刷新采取折中的办法,在 2ms 内分散的把各行刷新一遍。
eg: 存储周期扔为 500ns ,则刷新信号周期为 2ms/128 = 15.625 μs。刷新电路每隔 15.625 μs 产生一个刷新信号,刷新一行。
- 异步式刷新采取折中的办法,在 2ms 内分散的把各行刷新一遍。